
Figure 1: The microgripper is printed above the 5 μm diameter core of the 125 μm diameter single-mode optical fiber. Light from a laser is shone through the fiber, and the reflected spectrum can be read back. Thin layers of polymer (which are approximately 1 μm thick) are suspended by 3 springs and these give rise to an interference pattern that is reflected back. As the gripper closes, the air gaps between the polymer layers decrease and the interference pattern also changes as a result. This fact can be used to train a model to learn how to estimate forces on the gripper using reflected spectra.
These microrobots have the potential to revolutionize health care, for example, by replacing invasive, often complicated surgery with less invasive techniques. To date, most of the research has focused on autonomous, swimming-type microrobots, propelled and controlled by magnetic fields, Sometimes by ultrasound or light. However, microrobots can be tethered with the advantage that the connection can deliver a power source as well as control the microrobot’s global position.
Recently, a research team at Imperial College London reported the development of a tethered microrobot, a microgripper that is no bigger than 100 µm on each axis. Remember that a µm, or micrometer, is one-millionth of a meter! It is so small that you need a scanning electron microscope to see what the gripper (Figure 1)
looks like and to monitor its construction and operation, in this case TESCAN microscope. The research team used a relatively new 3D printing process, 2-photon polymerization, to fabricate the microgripper. Ultra-short laser pulses trigger a highly localized chemical reaction in a volume of soluble photosensitive material similar to that used in semiconductor manufacturing. Once exposed, the material becomes insoluble and, after washing in a developer bath, a self-supporting 3D structure is left behind. This process allows fabrication of microscale structures as small as 100 nanometres – that is one-tenth of a micrometer!
Using this technique the team fabricated the microgripper – in a single process, with all its parts assembled. They also printed it directly onto the tip of a 125 µm diameter optical fiber that carries only a single ray of light. Tethering the gripper in this way might sound simple, but this is the first time that such a small fiber-based micro-robotic system has been developed.
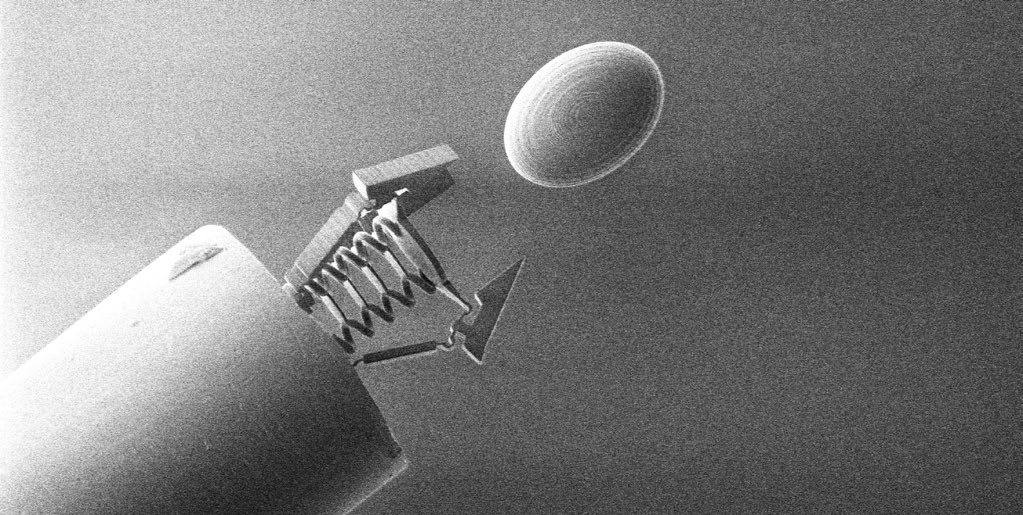
Figure 2: A microgripper, printed using 2-photon polymerization (a microscale 3D printing technique) onto an optical fiber substrate, approaches an ellipsoidal object. This rapid-prototyping fabrication method makes it easy to tailor the geometry and size of the micro tool to suit the target object. The gripper is a passive, compliant design with three fingers arranged 120° from each other.
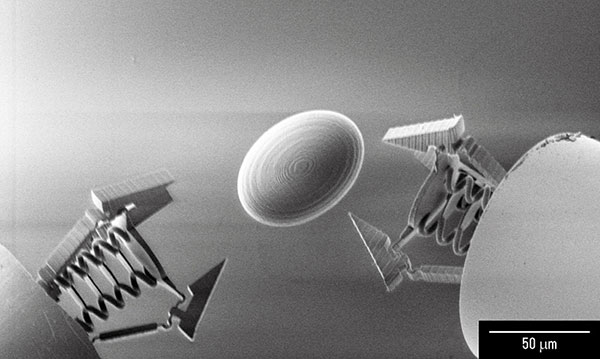
Figure 3: Two similar microgrippers approach a target object. Using two such grippers, the target object
can be manipulated or transported in a cooperative manner with real-time force readings.

Paul Wood and Maura Power from Imperial College London